第一次发布 2020/06/02
目录
前情介绍
自从学校里的硬件研究不得志之后就很少再接触,只是偶尔兴趣使然又会自己研究研究,或许日后猹的回忆录会更新一个篇章。
这次重拾硬件是因为营业,既然都是干活,软件也玩的有点腻了,换换口味觉得挺好~
总之就是需要一个设备,可以模仿人手的操作 滑动 或是 点击 手机上的特定位置,暂时先做一个简单的,就是用点机滑动屏幕,舵机点击按钮。
硬件设备
与之前的 远程温度监测系统 相同
- 一个自己管理的路由器(为了能够查看树莓派的 ip 方便之后 SSH),连接路由器的充电器和网线
- 树莓派 3B RS英国版(当然这个型号只是猹的设备,现在已经有4代了大家可以用最新的)、树莓派的充电器和网线、装树莓派系统用的 SD 卡
- 舵机两个,猹用的是这个
MG996R型号的舵机 - 两路继电器(2 Relay Module)一个
- 杜邦线若干(其实三根母对母的就够了,后面会讲)
- 学习用,在此项目中用不到,可忽略:步进电机+驱动板一套,猹用的是
28BYJ-48-5V这个型号
软件准备
系统
首先是系统,给树莓派装系统其实很简单,不会的同学参考猹的 安装教程 ,讲的很详细哒~
顺便猹用的是 raspbian 系统,注意现在官方页面改版了,看清楚点击哪里哦
基础软件
- 首先更新一下系统中预装的软件
apt update; apt upgrade -y - 之后检查
python和pip环境【猹习惯用python3python3 --version # 如果没有 -> apt install python3 pip3 --version # 如果没有 -> apt install python3-pip - 安装控制 io 口的函数库
pip3 install rpi.gpio如果这个命令无法正常运行,请参考 参考文章 中的第三个链接中的其他方法
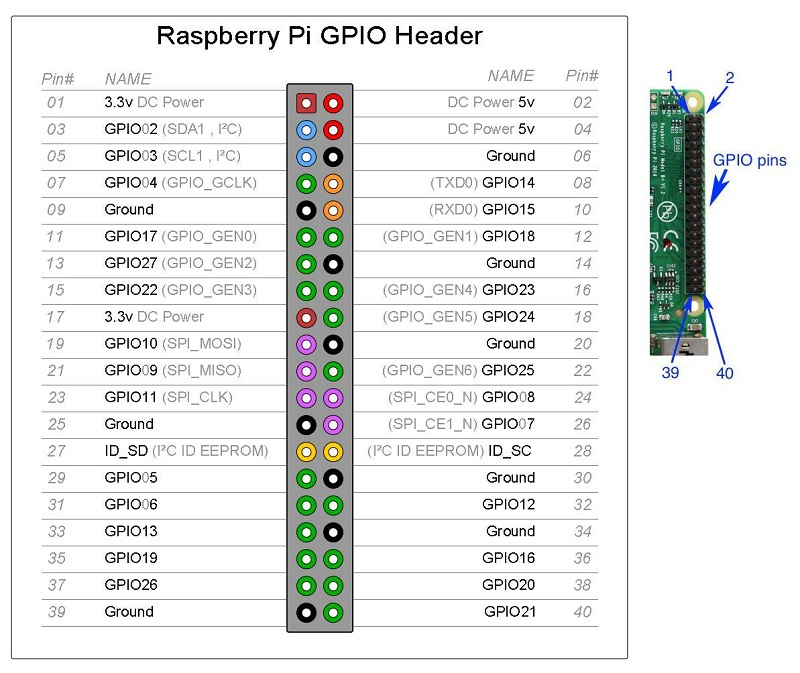
连线图
看过猹 de 基于树莓派的远程温度监测系统 这篇博客的话应该对这个图挺熟悉的,毕竟这个图是真的很实用
练习舵机的使用
如果是老司机请直接进入下一节
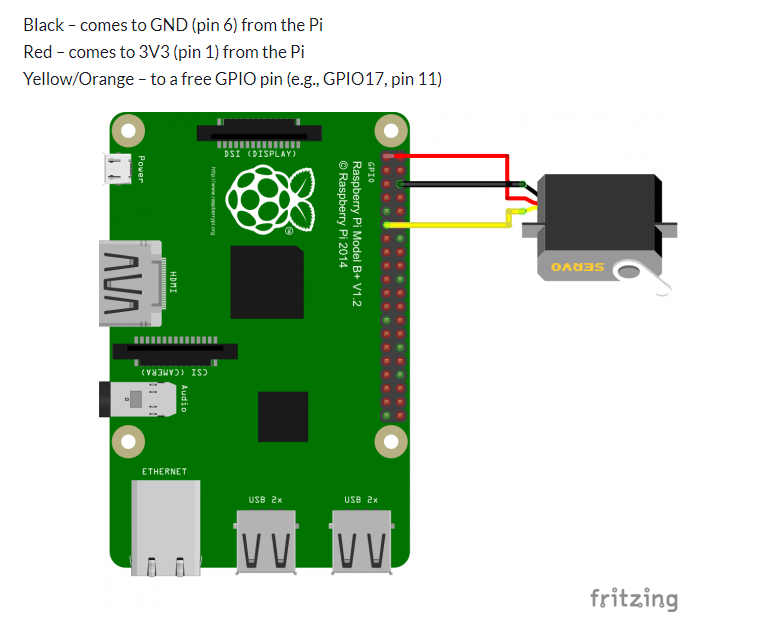
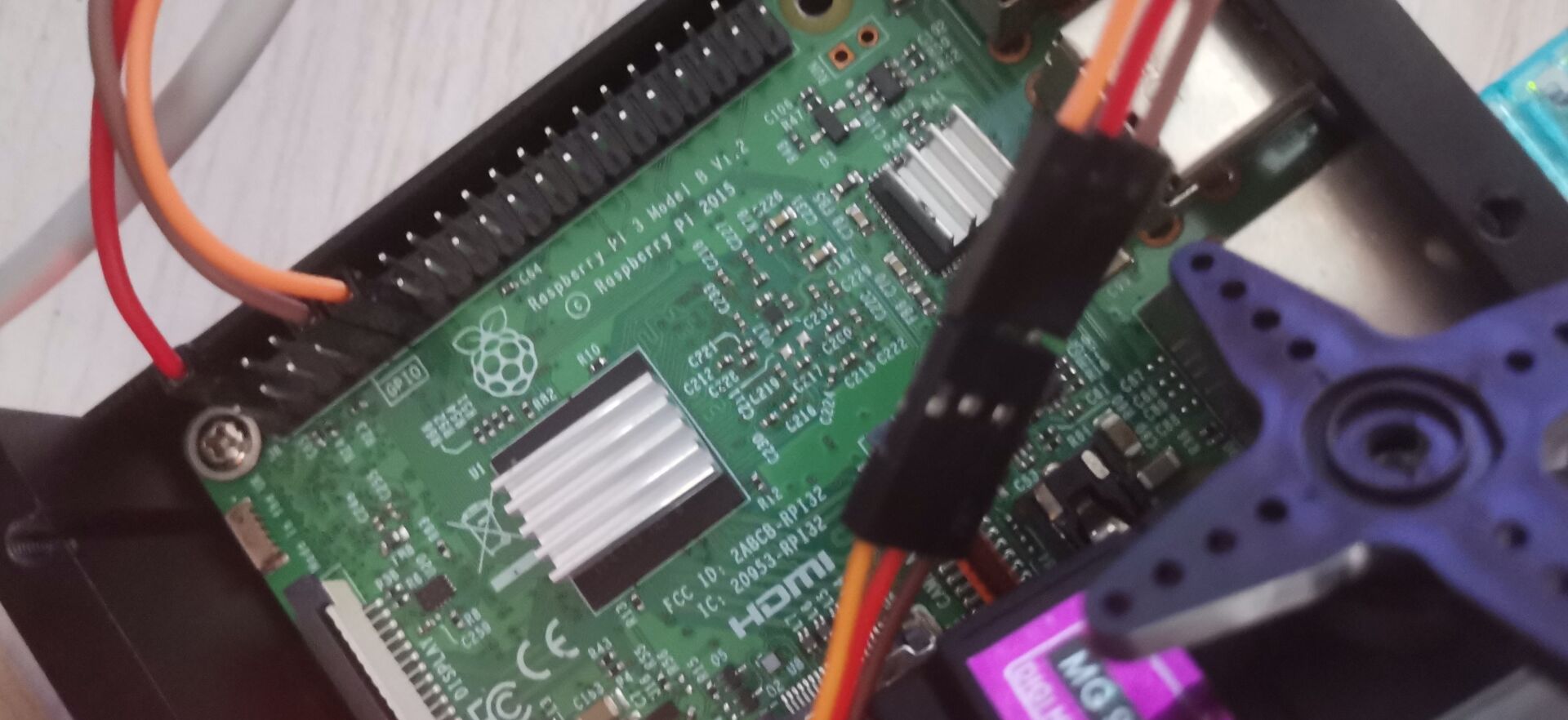
连线
连接舵机到树莓派上,这里的示意图很清晰,猹这里为了方便用的是 17 口旁边的 GND 其实是一样的
还有猹贴出来的教程里一开始说的是接 3.3V 的电源,猹失败了半天 甚至把舵机拆开了 才想到可能是电压不够,换 5V 的就可以了
舵机测试运行代码
快来用这个 注释很清晰 的代码来自己运行一下试试叭~
#-*- coding:utf-8 -*-
import RPi.GPIO as rg
import time
if __name__ == '__main__':
pin = 17 # 预定义接口
rg.setmode(rg.BCM) # 设置 io 模式
rg.setup(pin, rg.OUT) # 设置指定端口为输出模式
p = rg.PWM(pin, 50) # 设置指定接口的 PWM 为 50Hz
band = 10 # 设置 pwm 值的范围宽度,此型号的范围是 2.5~12.5
iniv = 2.5 # 设置 pwm 的初始值,即范围的下限(2.5)
pwmv = (0/180)*band + iniv # 占空比计算公式,舵机通过占空比来控制角度,范围是 2.5~12.5 对应 0~180 度
p.start(pwmv) # 初始化数值为 2.5
try:
while True:
for angle in range(0, 181):
pwmv = (angle/180)*10 + 2.5
p.ChangeDutyCycle(pwmv) # 转动到新的角度
print('angle = %s ' % angle, end = '\r')
time.sleep(0.1)
p.ChangeDutyCycle(2.5)
time.sleep(2)
# p.ChangeDutyCycle(2.5); time.sleep(1) # 可以只写这句代码来使舵机处于 0 度的状态,方便安装支架
except KeyboardInterrupt:
p.stop()
rg.cleanup()
练习步进电机的使用
如果是老司机请直接进入下一节
首先还是连线
如图所示步进电机直接接到驱动板上就行,参考 这里 的连线,按照自己的实际情况那些相同功能的 GPIO 都可以连,这里猹由于要和舵机一起使用,根据情况换了几个接口避免冲突
步进电机测试运行代码
快来用这个 注释很清晰 的代码来自己运行一下试试叭~
#-*- coding:utf-8 -*-
import RPi.GPIO as rg
import time
if __name__ == '__main__':
rg.setmode(rg.BCM) # 设置 io 模式
pins= [18, 27, 22, 16] # 预定义接口
for pin in pins:
rg.setup(pin, rg.OUT) # 设置指定端口为输出模式
rg.output(pin, False) # 初始化输出低电平【True表示输出高电平
act = [
[1, 0, 0, 1],
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
]
for i in range(1 << 10): # 运行一段时间
for s in range(len(act)): # 循环每一个命令
for p in range(4): # 循环每一个相位
rg.output(pins[p], act[s][p]) # 设置对应相位输出对应的电平
time.sleep(0.001) # 最短的时延就是 0.001 ,不能更小,会出错
rg.cleanup()
练习二路继电器的使用
如果是老司机请直接进入下一节
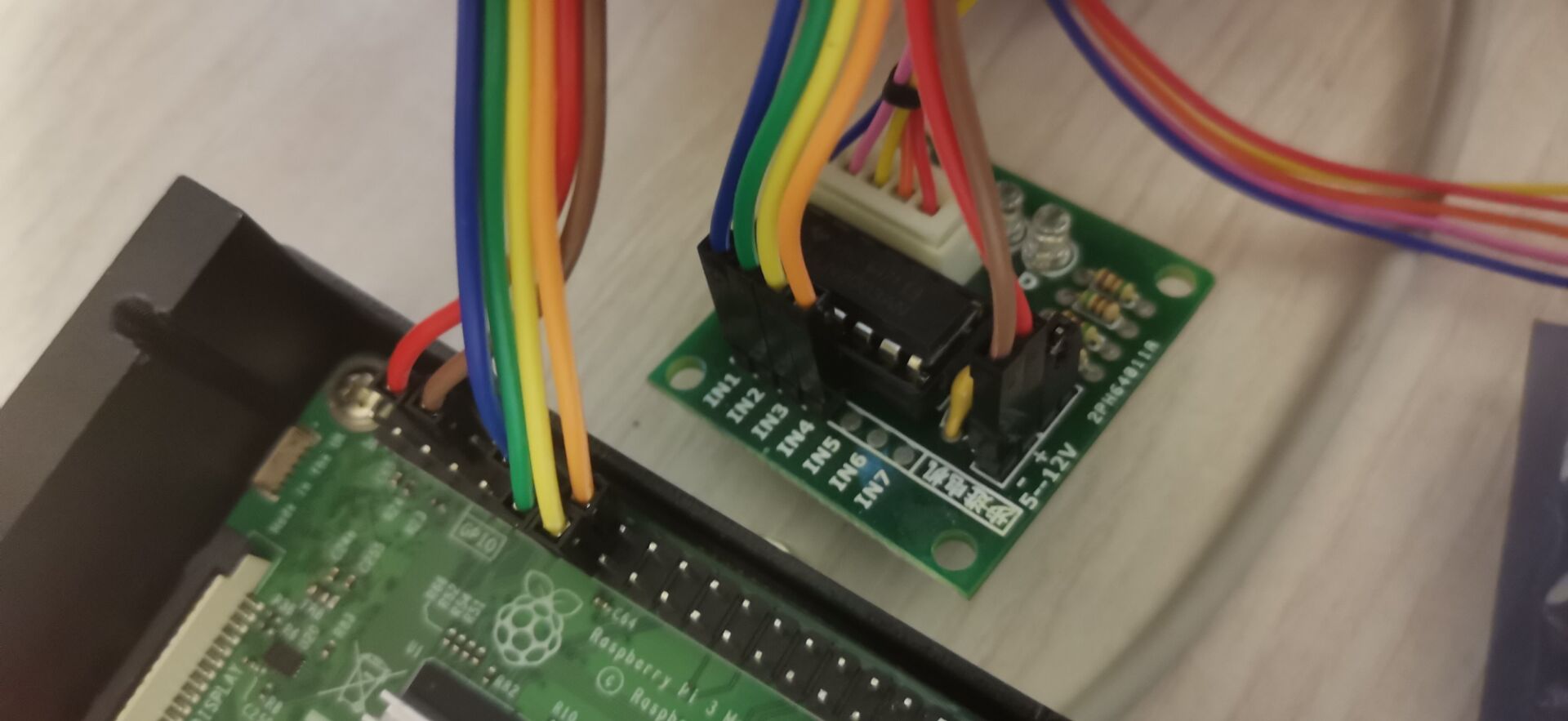
猹用的这个继电器长这样
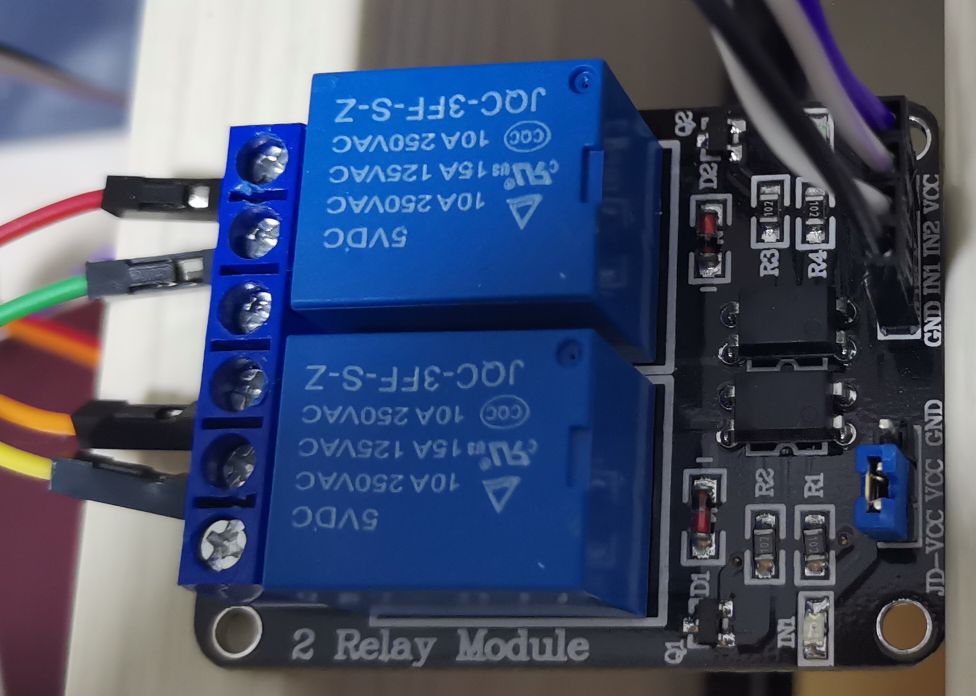
如果是八路输入的继电器可以自行百度,那种很容易找到教程~
首先还是连线
这个继电器它是控制了输出端的两个口之间的开关,所以输入的电源是需要接在输出的那个端口的
借用参考文章里的视频中的截图理解一下
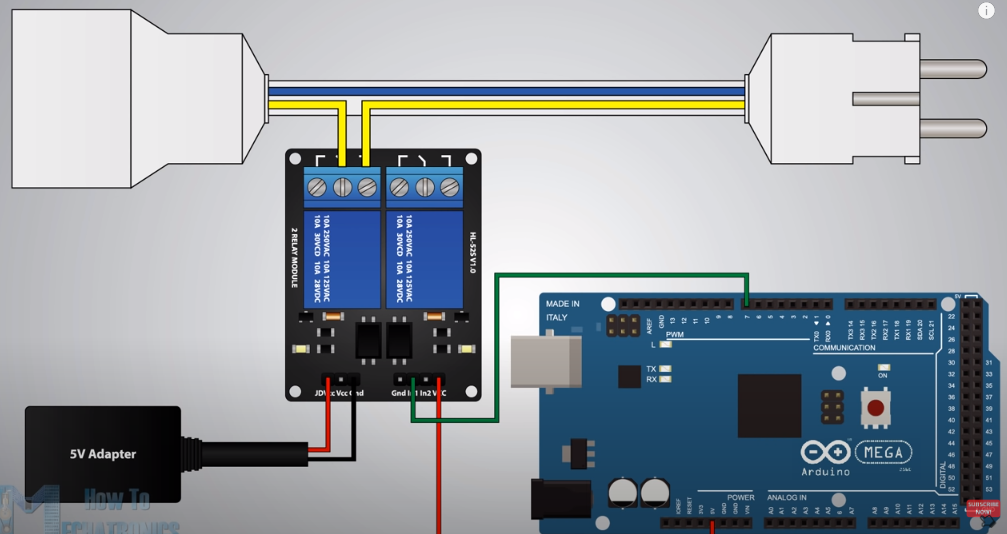
请看上面猹的示意图
- 紫, 红, 橙三根线连接树莓派的 +5V 电源(树莓派的电源不够的话请自行焊接到一起
- 黑线连接树莓派的 GND 脚
- 绿线/黄线 连接对应元件的正极,原件的负极 直接 连接到树莓派的 GND 上即可
- 白线/灰线 连接树莓派的 i/o 口,用来控制通断对应的输出(低电平有效
二路继电器测试运行代码
快来用这个 注释很清晰 的代码来自己运行一下试试叭~
#-*- coding:utf-8 -*-
import RPi.GPIO as rg
import time
if __name__ == '__main__':
rg.setmode(rg.BCM) # 设置 io 模式
rep = 22 # 设置接口
rg.setup(rep, rg.OUT) # 设置接口为输出模式
rg.output(rep, True) # 设置输出高电平,即1口输出断路
try:
while True:
# 接通 3s 后断开 3s
rg.output(rep, False)
time.sleep(3)
rg.output(rep, True)
time.sleep(3)
except:
# 退出时关闭输出并清空接口占用
rg.output(rep, True)
time.sleep(3)
rg.cleanup()